Gyro Symposium | Composite Propeller | Hobbies| Site Map
Electric Autogyro? Jukka Tervamäki, Oct 15, 2000Latest update November 25, 2006 |  |
The first electric (solar) powered aircraft, the Solar Challenger by Paul MacCready, crossed the English Channel in 1981. Since then a lot of research money has been spent on both sides of the Atlantic on this subject. In the USA solar power is the NASA focus for unmanned high-altitude research aircraft. In Europe Germans are concentrating on the development of electrically powered motorgliders. Motorgliders are very good devices to use electric propulsion since power is needed only for a few minutes during take off. Then pick up the first thermal and start soaring for hours. There is not enough surface area in an autogyro to install large amounts of solar cells and they are very expensive anyway. However, two recent German developments promise a future for an electric autogyro: the Silent Motorglider by Alisport and the Antares motorglider by Lange Flugzeugbau. Instead of using solar cells Silent and Antares rely solely on NiCad and NiMH batteries. In recent years Lithium Ion batteries have been under rapid development and today offer energy densities up to 160 Wh/kg for reasonable prices. Batteries with energy density of 250 Wh/kg are under development. The Lithium-Ion-Batteries are able lift the 510 kg Antares motorglider to 3000 m (9840 ft) altitude.
A HIGHLY EFFICIENT ELECTRIC POWER UNIT:
2) Due to the low motor rpm the propeller is big and efficient (83 percent). The propeller diameter is 2 metres (79 in). The noise level of the Antares is only 40 dB, so low that you can hardly hear it from a distance of 100 m (yards).
3) The NiMH (Nickel Metal Hydride) battery pack consists of 9 element square rods of 4.5 m total length in each wing. The Voltage is 200 V and the initial current 200 A in take off. Recharging requires 8 kWh of energy while the nominal output is 6.5 kWh. However, at full power the output is 5.4 kWh. The Japanese manufacturer and Lange have not yet given the total weight of the battery pack but my guess is roughly 80 to 100 kg. The batteries can be recharged 500 times and a new set costs around DEM 20000.
4) The motor and batteries need a high power electronic control unit which weighs 7 kg. The power cables are fairly short in the Antares and weigh 5 kg.
5) Finally there is an electronic/electric throttle quadrant which sends commands to the control unit for power adjustment.
NOW, LET US INSTALL A SIMILAR POWER UNIT INTO AN AUTOGYRO:
The Simple Approach
As a 3D modelling project the Simple approach is not very appealing. Therefore, I have modified my JT-9 Virtual autogyro model for electric power. A better looking machine would please the crowds in air shows where the first electric autogyros will be shown anyway.
The
electric motor and the big 2 m propeller fit well onto the nose of the
JT-9B. A smaller 1.8 m 3-bladed prop could be used as well but would be
heavier. To save weight the propeller should be made of carbon
fiber/epoxy laminate.
To fit the battery pack onto both sides of
the fuselage, two large cowlings are required. They also allow
adjustable battery cooling vents. The power control unit could be
situated in place of the fuel tank or on the nose behind the motor. I
much prefer a tricycle landing gear but, in this case, modelled a tail
dragger configuration to save weight.
The model below has been created using form•Z RenderZone software.
 |  |
 |  |
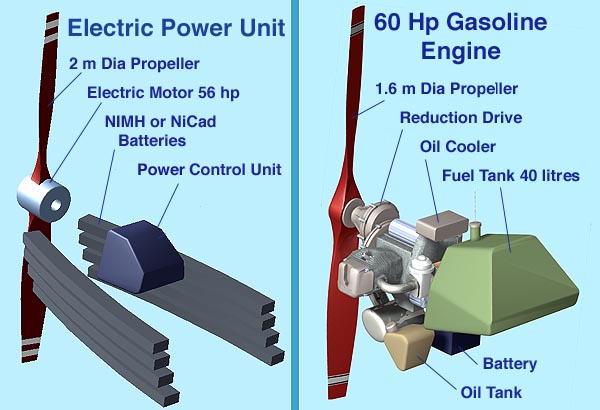
| Electric Motor | 28.5 kg | Gasoline Engine | 50 kg |
| 2 m dia Propeller | 5 kg | 1.6 m dia Propeller | 4 kg |
| NiMH Batteries | 80 kg | Muffler | 5 kg |
| Control Unit | 7 kg | Oil Tank + Oil | 3 kg |
| Cables | 10 kg | Oil Cooler | 2 kg |
| Fuel Tank + Fuel | 35 kg | ||
| Battery | 5 kg | ||
| Cables, Hoses, Wires | 3 kg | ||
| TOTAL | 130.5 kg | TOTAL | 107 kg |
| Endurance | 20 min | 3 hrs |
The standard JT-5 rotor with a 7 m diameter would do the job but for optimum endurance I would choose an 8 m diameter rotor. Furthermore, a small performance gain could be achived by increasing the aerodynamic pitch of the blades from 4 to 5 degrees (geometric pitch about 2.5 degrees for the NACA 8-H-12 airfoil). The electric autogyro would be a slow flying machine anyway, so the pitch increase would not be a safety hazard.
Performance
For performance calculations (using the GyroCalc), I assumed a gross weight of 250 kg for the Simple model and 280 kg for the JT-9B. The Simple model has, of course, a higher drag fuselage but, on the other hand, the JT-9B has a higher weight. Surprisingly, with these assumptions both machines have approximately the same climb performance and also the same minimum required power for level flight. The optimum speed for the Simple model is 65 kmph and 80 kmph for the JT-9B. It looks like both gyros could climb up to to an altitude of 1800 m (5900 ft) at full power.
The minimum power required for level flight is 21 hp or 15.7 kW. This means that both gyros could achieve a 20 minute endurance by climbing fast to about 500 ft altitude and then circling around at optimum level speed. However, no reserves, so you have to autorotate down when the batteries are exhausted. And you can forget the whole matter if your airfield is high in the mountains in a hot place. Gyros are very sensitive to high density altitudes.
These performance calculations depend heavily on the final weight of the battery pack and its support sytem for which I do not have exact information. According to the books NiMH batteries have an energy density of 60-100 Wh/kg.
The news of new Li-Ion batteries in 2006 promise energy densities up to 180 Wh/kg
and future developments up to 250 Wh/kg. This means that an electric
autogyro may well be able to fly up to 30 minutes with present day
battery technology and close to one hour in a few years time.
Since my last update 2006 both motor and Li-Ion battery development has
continued and I have received information that the newest Tesla
batteries offer now energy densities of 224 Wh/kg and an Emrax motor of
55 kW weighs 12 kg. So, we are on the track I envisiond in 2006.
In the future the energy density of new type of fuel cells may be much higher.
When that happens, electric cars, boats, airplanes, gyros and even
helicopters may be possible. Sure, the future is interesting.
Who will be the first?
My virtual electric gyro, the JT-9B, was the first on the virtual skies. Who will the first in the real world? As shown, a 20 minute endurance should be possible for an electric gyro. A 30 minute endurance would be difficult to achieve and one hour endurance is a real challenge. Perhaps the gyro community would need a sponsor to offer $ 50000 for anyone staying up there atleast one hour in an electric gyro?
The high voltage (200 V) and the high current (200 A) of the battery pack pose a real danger, 200 V is a potential killer. DC voltage is more dangerous than AC.
In addition, any short circuiting would cause a disaster, a terrible electric arc or melting of the cables and smoking batteries. (In the Antares electric glider all power cables have multiple Kevlar insulation and all connectors are safety connectors.)
An electronic power control unit is mandatory. You cannot just switch the power on due to very high acceleration of the motor and the gyro.

I
have very much enjoyed reading your web page on electric autogyro (as
well as the rest of your web pages.) Thanks for your engineering
enthusiasm! Engineering and art are much closer connected than we are
usually led to believe. In my opinion, your work is a proof of that.
Martin F. Bassani
Thank you for a most informative page. It is not often I see such a wide variety of "new" ideas in aviation on one page.
Ted von Hirsch
With best wishes, and warm regards,
Harold Solomon Kramer
Gyro Symposium | Composite Propeller | Hobbies| Site Map